transformer变体
1. Introduction
在这篇博客,我们详细的介绍了transformer的结构,也介绍了transformer还存在的问题,接着本篇文章将会介绍关于transformer的多种改进,让我们了解一下更加丰富多彩的transformer结构。
2.各种变体
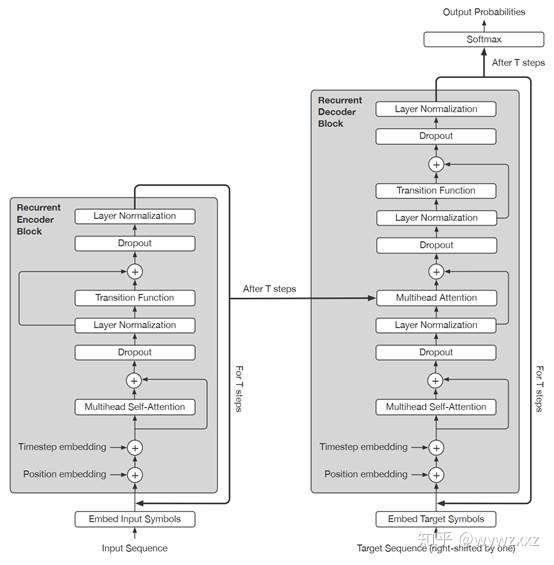
2.1 Universal transformers(UT)
提出于2018年,是transformer的后续工作,它的提出是为了解决transformer固有的非图灵完备性及缺少conditional computation的问题。
UT与transformer的结构基本相同,只是在细节方面存在着差异:
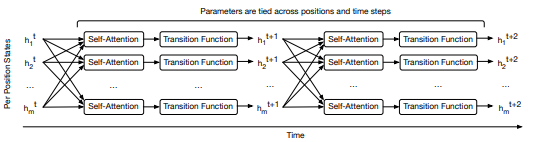
理解transformer后这里很容易理解,稍微的区别就是注意由于transformer只有一次前传,所以位置与时间编码都是一次的,而UT则使用了类似RNN的循环,所以每次迭代都要编码位置信息和时间信息,编码方式为: \(P_{i,2j}^{t} =sin(i/10000^{2j/d})+sin(t/10000^{2j/d})\)
\[P_{i,2j+1}^{t} =cos(i/10000^{2j/d})+cos(t/10000^{2j/d})\]![]()
循环的加入解决了图灵完备性问题,那么conditional computation问题则是通过Adaptive Computation Time(ACT)机制来实现的。此处供参考
2.2 Transformer-XL
CMU联合Google Brain在2019年1月推出的新模型,它的提出解决了transformer模型对长文本建模能力不足的问题。受限于算力问题,对于长文本,如果一次全部输入,考虑到query,key, value的shape为[batch_size, seq_len, d_model],很容易就OOM,这时候,一个变通方法就是通过分割成长度小于等于$d_{model}$(默认512)的segment,每个segment单独处理,互不干涉,这种模型也被称为vanilla Transformer。
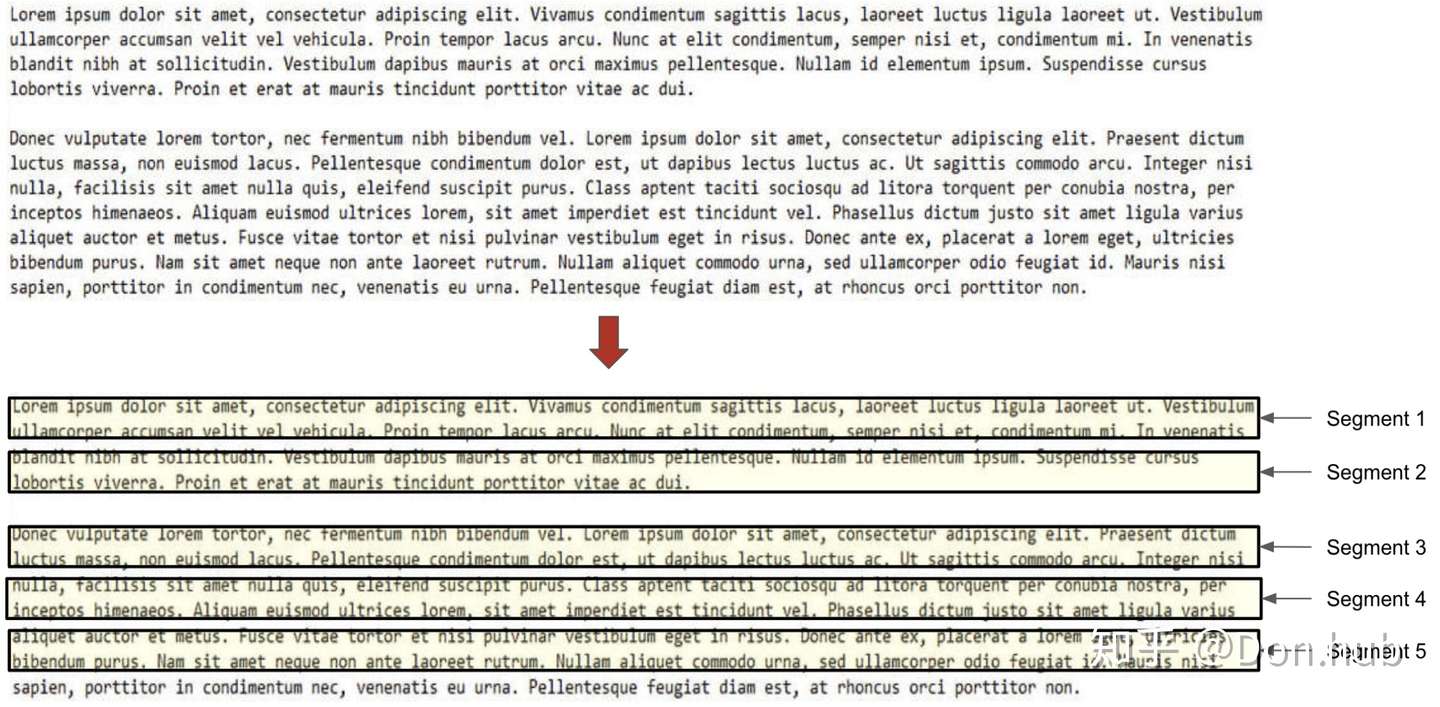
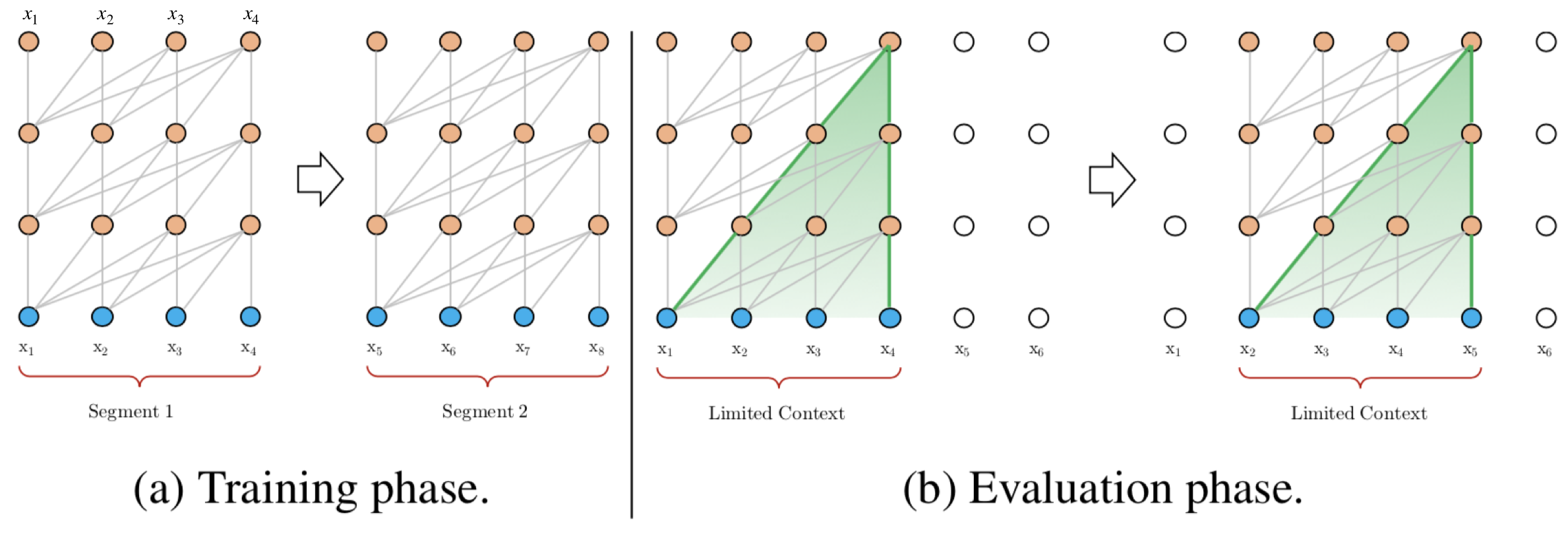
在vanilla transformer中,根据之前的字符预测片段中的下一个字符。例如,它使用$x_{1}$ , $x_{2}$ , . . . ,$x_{n − 1}$预测字符$x_{n}$,而在之$x_{n}$后的序列则被mask掉。它将输入分成段,并分别从每个段中进行学习,如上图所示。 在测试阶段如需处理较长的输入,该模型会在每一步中将输入向右移动一个字符,以此实现对单个字符的预测。
很显然,这样的处理是存在问题的:
- 上下文长度受限:字符之间的最大依赖距离受输入长度的限制,模型看不到出现在几个句子之前的单词。
- 上下文碎片:对于长度超过512个字符的文本,都是从头开始单独训练的。段与段之间没有上下文依赖性,会让训练效率低下,也会影响模型的性能。
- 推理速度慢:在测试阶段,每次预测下一个单词,都需要重新构建一遍上下文,并从头开始计算,这样的计算速度非常慢。
针对上面的问题,transformer-xl通过一种被称为Segment-level Recurrence的技术来解决,其思路类似于RNN,通过将前一个segment的memory送入到下一阶段来实现信息传递。
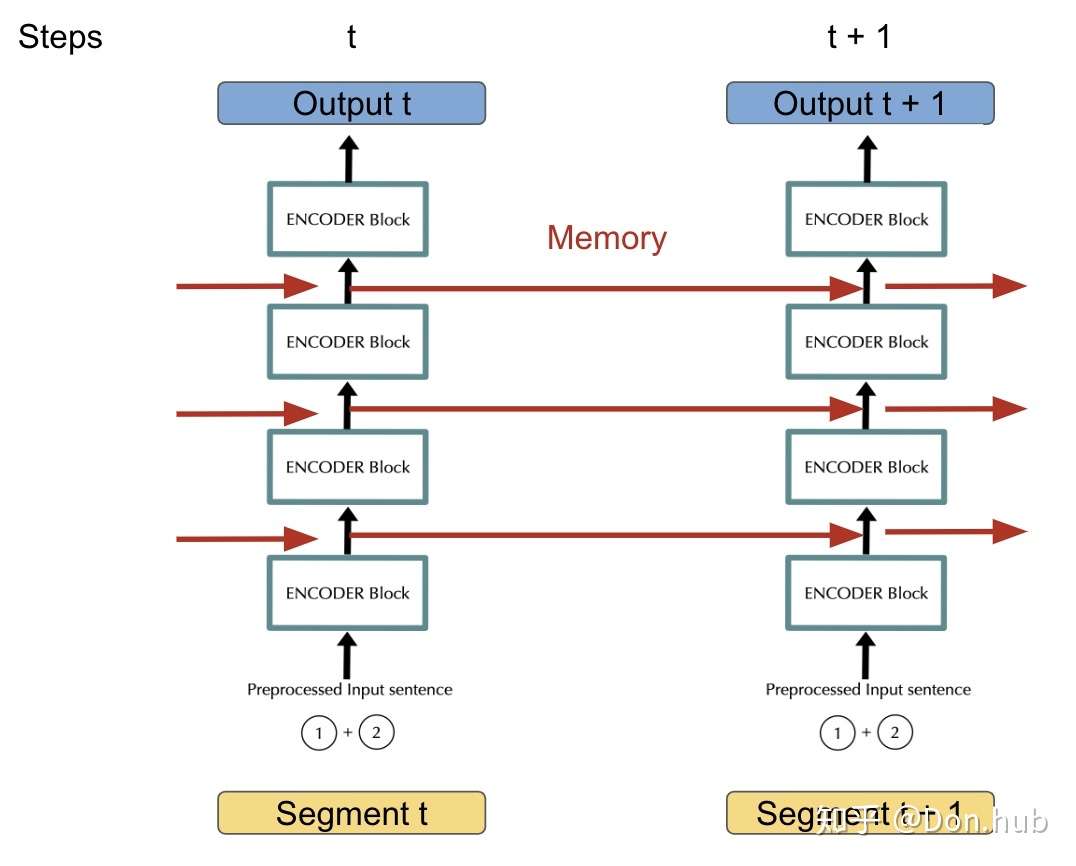
具体的过程中,加入segment t生成的memory为(prev_seq_len, batch_size, d_model), segment t+1进行运算的时候,对于其key和value,由于这两个状态编码了token的信息,因而需要look ahead来混合t时刻的信息,做法就是在进行multihead的时候,不是针对当前时刻的输入x(cur_seq_len, batch_size, d_model)进行project(x),而是进行project(concat([memory, x], axis=0))(project一般为Linear层),另外,memory不参与本segment的反响传播。

其中,τ表示第几段,n表示第几层,h表示隐层的输出。SG(⋅)表示停止计算梯度,$[ h u ∘ h v ]$ 表示在长度维度上的两个隐层的拼接,W.是模型参数。
transformer-xl中还有个需要注意的地方就是,其使用的不是absolute positional encoding,因为在分段的情况下,如果仅仅对于每个段仍直接使用Transformer中的位置编码,即每个不同段在同一个位置上的表示使用相同的位置编码,就会出现问题。比如,第i−2段和第i−1段的第一个位置将具有相同的位置编码,但它们对于第i段的建模重要性显然并不相同(例如第i−2段中的第一个位置重要性可能要低一些)。因此,需要对这种位置进行区分。取而代之的是,transformer-xl使用的是relative position encoding技术,其提出理论基础如下: \(\begin{aligned} (QK^{T})_{i,j}&=(E+P)_{i,\circ}W^{Q}(W^{K})^{T}(E+P)^{T}_{\circ,j}\\&=(E+P)_{i,\circ}W^{Q}(W^{K})^{T}(E^{T}+P^{T})_{\circ,j}\\&=E_{i,\circ}W^{Q}(W^{K})^{T}(E^{T}+P^{T})_{\circ,j}+P_{i,\circ}W^{Q}(W^{K})^{T}(E^{T}+P^{T})_{\circ,j}\\&=\underbrace{E_{i,\circ}W^{Q}(W^{K})^{T}E^{T}_{\circ,j}}_{a}++\underbrace{P_{i,\circ}W^{Q}(W^{K})^{T}P^{T}_{\circ,j}}_{b}+\underbrace{E_{i,\circ}W^{Q}(W^{K})^{T}P^{T}_{\circ,j}}_{c}+\underbrace{P_{i,\circ}W^{Q}(W^{K})^{T}E^{T}_{\circ,j}}_{d} \end{aligned}\) 其中E为token的embeddings,P为positional embeddings,这俩均是经过了extend,添加上了上一个segment的memory信息。从上面的公式来看,主要分了4项:
- a 项没有包含
位置信息,代表的是在第
行的字应该对第
列的字提供多大的注意力。
- b 项捕获的是模型的global attention,指的是一个字在position
- c 项在捕获的是position i处的字对于position j的注意力的程度。
- d 项是c项的逆序。
上面的展开其实是transformer 的展开,transformer-xl做了如下的改进: \(\begin{aligned} &替换b,c,d项\\ &b:P_{i,\circ}W^{Q}(W^{K})^{T}P^{T}_{\circ,j}\mapsto \mu(W^{R})^{T}P_{\circ,i-j}^{T}\\&c:E_{i,\circ}W^{Q}(W^{K})^{T}P^{T}_{\circ,j} \mapsto E_{i,\circ}W^{Q}(W^{R})^{T}P_{\circ,i-j}^{T}\\&d: P_{i,\circ}W^{Q}(W^{K})^{T}E^{T}_{\circ,j} \mapsto \nu(W^{K})^{T}E_{\circ,j}^{T}\\&最终得到:\\&(QK^{T})_{i,j}=E_{i,\circ}W^{Q}(W^{K})^{T}E^{T}_{\circ,j}+\mu(W^{R})^{T}P_{\circ,i-j}^{T}+E_{i,\circ}W^{Q}(W^{R})^{T}P_{\circ,i-j}^{T} +\nu(W^{K})^{T}E_{\circ,j}^{T} \end{aligned}\) 对比来看,主要有3点变化(集中在键的相对位置及尤其引起的其他变化):
- b,c两项中,将所有绝对向量$P_{i}$转为相对位置向量$P_{i-j}$,和vanilla Transformer一样,这是个固定的编码向量,不需要学习。
- d项,将查询的$P_{i,\circ}W^{Q}$向量转为一个需要学习的参数向量
,因为在考虑相对位置的时候,不需要查询绝对位置
,因此对于任意的
,区分对待主要是和第3点结合。
- 将键的权重变换矩阵
分为
和
两个矩阵,分别得到content-based的键向量、location-based的键向量,更加细致。
在新的计算形式下,每一项都有了更加直观的意义,如下:
表示基于内容的寻址,即没有考虑位置编码的原始分数
表示全局的位置偏置,从相对位置层面衡量键的重要性
表示内容相关的位置偏差,即相对于当前内容的位置偏差
表示全局的内容偏置,从内容层面衡量键的重要性
⚠️:relative positional encoding在工程层面有个trick,可去原文的appendix B查看。
工程实现图示,有助于工程实现的理解


最终,transformer-xl相比于transformer取得了明显的提升:
- Transformer-XL学习的依赖项比RNNs长80%左右,比最初的transformer长450%,最初的transformer通常比RNNs具有更好的性能,但由于上下文的长度固定,不是远程依赖项建模的最佳选择
- 在评估语言建模任务时,ransformer-XL的速度比vanilla transformer快1800多倍,因为不需要重新计算。
- 由于有更好长距离依赖建模,Transformer-XL在长序列上具有更好的perplexity性能(更准确地预测样本);而且通过解决上下文碎片问题,它在短序列上也有更好的性能。
2.3 Reformer
ICLR 2020论文,致力于解决解决transformer的对资源的饥渴需求问题,标准的transformer有效率方面有着比较大的问题:
- transformer单层的参数在5亿个,需要内存约2GB;每一层的激活结果,假如序列大小为 64K , embedding size是1024,batch size是8,共计64k *1k *8=5亿个floats,又需要2GB的内存。如果多层叠加起来,对于资源的消耗是非常惊人的。
- Transformer每一层中间的前馈全连接网络的维度$d_{ff}$要比注意力层的$d_{model}$大的多,所以消耗的内存更多。
- 序列长度为L的attention在时间和空间的复杂度都是$O(L^{2})$,所以如果序列过大,很容易就出现OOM的问题。
针对上面的问题,Reformer通过三个改进来加以解决:
- Reversible layers,只需要存储一层的激活结果即可,N的因素消失了。
使用Reversible residual Network (RevNet),其思想是每一层的activations可以根据下一层的activations推导获得,从而不需要在内存中储存activations。在原本的residual layer中,由公式输出得到activations。其中F是residual 函数。在RevNet中,先将输入
分为两个部分
和
,然后通过不同residual functions:
和
得到输出
和
:
再根据以下结构,从输出获得输入:
将可逆残差网络的思想应用到Transformer中,在可逆块中结合了自注意力层和前馈网络层。结合上面的可逆残差公式,F函数变成了自注意力层,G函数变成了前馈网络层,注意的是每层的归一化处理放在了残差块里面。
如此,使用可逆的Transformer在每一层中就无需存储激活值,也就避免了这一项。可逆层代替标准的残差层,可以在训练过程中只存储一次激活,而不是$N$次。
- 分块计算前馈全连接层,节省内存。
每一层Transformer中前馈网络所用的中间向量维度$d_{ff}=4k$甚至更高维度,依然非常占用内存;然而,一个序列中各个tokens在前馈网络层的计算是相互独立的,所以这部分计算可以拆分为c个组块以降低内存的使用。虽然该操作其实可并行处理,但是每次只计算一个chunk,通过时间换取内存空间:
- 采用局部敏感哈希(Locality-Sensitive Hashing, LSH)技术,近似计算注意力,将时空开销从$O(L^{2})$变为$O(LlogL)$。
标准transformer中,记忆力计算公式为: \(Attention(Q,K,V) = softmax(\frac {QK^{T}}{\sqrt[]{d_{k}}})V\) 而Softmax下其实有很多的值被置为了0,有价值的$q_{i}k_{j}^{T}$往往是非常少的,所以完全不需要计算全量的$QK^{T}$,只需要计算与query最想干的若干个key即可。而如何选择最想干的那些key呢?
答案就是LSH,其基本思路是距离相近的向量能够很大概率hash到一个桶内,而相距较远的向量hash到一个桶内的概率极低。
formally,LSH attention的计算流程如下:
改写公式(3): \(o_{i}=\sum_{j \in P_{i}}exp(q_{i}*k_{j}-z(i,P_{i}))v_{j}\quad where\ P_{i}={j:i \ge j}\) $P_{i}={j:h(q_{i})=h(k_{j})}$就是位置$i$的query需要关注的tokens集合,$h$代表$hash$函数,$z$表示分区函数(即$softmax$中的规格化项,相当于$softmax$中的分母),为了简便,这里省去了$\sqrt[]{d_{k}}$ 。
为了便于批计算,在整个序列上做个修改,$\widetilde{P_{i}}={0,1,,…,l}\supseteq P_{i}$使用如下修正公式:
\(o_{i}=\sum_{j \in \widetilde{P_{i}}} exp(q_{i}*k_{j}-m(j,P_{i})-z(i,P_{i}))v_{j}\quad where \, m(j,P_{i})=\begin{cases}&\infty\quad if\,j \notin P_{i} \\&0\quad otherwise\end{cases}\)
即对于不能attend到的位置,为正无穷,那么
减去正无穷再去exp操作,其结果为0。相当于mask掉了,这样就不需要对于每个位置i都有单独的
.

图a:常规的attention机制中,黑点代表的是softmax中占主导的位置。注意这边的attention使用的是encoder的attention, 否则 无法attend to
。另外,这种全attention(即encoder中的attention)的attention矩阵一般是稀疏的,但计算中并没有利用这种稀疏性,所以可以利用这个降低时间空间复杂度。
图b:计算query和key所归属的hash桶。再按照桶进行排序,同一个桶又按照原本的位置进行排序得到图b。可以看到,同一个桶,可以出现多个query但keys很少的情况,例如图中蓝色的桶query有3个,都attend到同一个key中。由于相似的item很有可能落在同一个桶里,所以只在每个桶内部进行attention就可以近似全attention。
| 图$c$: Hash桶容易产生不均匀的分配,跨桶处理是比较困难的;另外,一个桶内的queries和keys数量不一定相等,事实上,有可能存在桶中只有queries而没有keys的情况。为了避免这种情况,首先通过$k_{j}=\frac{q_{j}}{ | q_{j} | }$ 确保$h(k_{j})=h(q_{j})$;其次,外部根据桶号排序,每个桶中,仍按照原本的position 位置大小排序。对比b图和c图可以看出,纵轴的k已经变成了q。这时候就能保证对角线都是attend 到的而且q和k在桶中的个数一样(因为Q=K)。排序后的attention矩阵,相同桶的值会在对角线附近聚集。注意到图中对角线的点为空心,这是因为虽然在正常情况下,q会attend to本身位置的value,但是在share-QK的实现下,如果attend to本身,会导致其值特别大,其他的值特别小,经过softmax之后,其他都是0,就自己本身是1。所以为了避免这种情况,q不会去attend 自身位置的值,除非只有自己本身可以attend。 |
图d: 即使Q=K,还是会出现一个问题:有的桶中个数多,有的桶中个数少。比如一个极端情况,2个桶,其中一个桶占据了所有的keys,另一个桶为空,那么LSH attention就没有起作用。于是在图c的基础上,增加了chunk的操作。对输入进行排序之后(即图c中先桶排序,同个桶内按照token 的 position排序)得到新的序列顺序,比如图中原来的序列顺序是
,新的序列顺序是
。每个chunk内query的上限个数为
, (
为输入query的长度) ,每个桶平均大小为
,这里假设桶中数量增加到均值两倍的概率足够低。对于桶中的每个query,都可以attend to自己以及前一个桶中相同hash 值的key。


单个hash函数,总不可避免的会出现个别相近的items却被分到不同的桶里,多轮$hash \ {h(1),h(2),…}$可以减少这种情况的发生: \(P_{i}=\bigcup_{r=1}^{n_{rounds}}P_{i}^{(r)}\quad where \ P_{i}^{(r)}=\{j:h^{(r)}(q_{i})=h^{(r)}(q_{j})\}\)
def make_unit_length(x, epsilon=1e-6):
'''
k_{j}=\frac{q_{j}}{ ||q_{j}||}
对query_{j}归一化得到key_{j},确保可以映射到同一个桶中,要注意这里是针对每个桶内做softmax(QK^{T})的。
:param x: [batch_size, n_hashes*n_buckets, bucket_size, emb]
'''
norm = x.norm(p=2, dim=-1, keepdim=True)
return x.div(norm + epsilon)
def sort_key_val(t1, t2, dim=-1):
values, indices = t1.sort(dim=dim)
t2 = t2.expand_as(t1)
return values, t2.gather(dim, indices)
def batched_index_select(values, indices):
last_dim = values.shape[-1]
return values.gather(1, indices[:, :, None].expand(-1, -1, last_dim))
class LSH_Attention(nn.Module):
'''LSH attention的实现'''
def __init__( self,
dropout = 0.,
bucket_size = 64,
n_hashes = 8,
attend_across_buckets = True,
drop_for_hash_rate = 0.0):
'''
:param attend_across_buckets:是否允许跨桶attend
'''
super().__init__()
if dropout >= 1.0:
raise ValueError('Dropout rates must be lower than 1.')
self.dropout = nn.Dropout(dropout)
self.dropout_for_hash = nn.Dropout(drop_for_hash_rate)
self.n_hashes = n_hashes
self.bucket_size = bucket_size
self._attend_across_buckets = attend_across_buckets
def _sample_rotation(self, shape, vecs):
'''
随机旋转的矩阵
:param vecs: [batch_size, seqlen, emb]
'''
device = vecs.device
return torch.randn(shape, device=device)
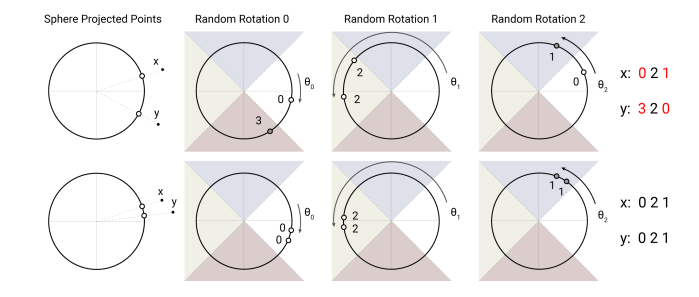
def hash_vectors(self, n_buckets, vecs):
batch_size = vecs.shape[0]
device = vecs.device
assert n_buckets % 2 == 0
rot_size = n_buckets
rotations_shape = (
vecs.shape[-1],
self.n_hashes,
rot_size // 2)
random_rotations = self._sample_rotation(rotations_shape, vecs)
dropped_vecs = self.dropout_for_hash(vecs)
# 随机旋转,rotated_vecs的shape为[batch_size, n_hashes,seqlen, rot_size//2],代表每一轮hash的序列被分到的桶
rotated_vecs = torch.einsum('btf,fhi->bhti', dropped_vecs, random_rotations)
rotated_vecs = torch.cat([rotated_vecs, -rotated_vecs], dim=-1)
# buckets: [batch_size, n_hashes, seqlen]
buckets = torch.argmax(rotated_vecs, axis=-1)
# 为每一轮的hash添加不同的offset,确保不同hash轮数的桶编号不会重叠。
offsets = torch.arange(self.n_hashes, device=device)
offsets = torch.reshape(offsets * n_buckets, (1, -1, 1))
buckets = torch.reshape(buckets + offsets, (batch_size, -1,))
return buckets
def forward(self, qk, v):
batch_size, seqlen, _ = qk.shape
device = qk.device
n_buckets = seqlen // self.bucket_size
n_bins = n_buckets
buckets = self.hash_vectors(n_buckets, qk)
# We use the same vector as both a query and a key.
assert int(buckets.shape[1]) == self.n_hashes * seqlen
ticker = torch.arange(0, self.n_hashes * seqlen, device=device).unsqueeze(0)
# 为桶内word加上编号,以实现先按桶排序,内部再按照词排序
buckets_and_t = seqlen * buckets + (ticker % seqlen)
buckets_and_t = buckets_and_t.detach()
# sticker标识排序后的下标索引
sbuckets_and_t, sticker = sort_key_val(buckets_and_t, ticker, dim=-1)
# 这里对sticker进行重新排序,以便恢复序列的输入顺序
_, undo_sort = sort_key_val(sticker, ticker, dim=-1)
sbuckets_and_t = sbuckets_and_t.detach()
sticker = sticker.detach()
undo_sort = undo_sort.detach()
st = (sticker % seqlen)
sqk = batched_index_select(qk, st)
sv = batched_index_select(v, st)
# Split off a "bin" axis 以便chunk内部进行attention计算
bq_t = bkv_t = torch.reshape(st, (batch_size, self.n_hashes * n_bins, -1))
bqk = torch.reshape(sqk, (batch_size, self.n_hashes * n_bins, -1, sqk.shape[-1]))
bv = torch.reshape(sv, (batch_size, self.n_hashes * n_bins, -1, sv.shape[-1]))
bq_buckets = bkv_buckets = torch.reshape(sbuckets_and_t // seqlen, (batch_size, self.n_hashes * n_bins, -1))
# Hashing operates on unit-length vectors. Unnormalized query vectors are
# fine because they effectively provide a learnable temperature for the
# attention softmax, but normalizing keys is needed so that similarity for
# the purposes of attention correctly corresponds to hash locality.
bq = bqk
bk = make_unit_length(bqk)
# Allow each chunk to attend within itself, and also one chunk back. Chunk
# boundaries might occur in the middle of a sequence of items from the
# same bucket, so this increases the chances of attending to relevant items.
def look_one_back(x):
x_extra = torch.cat([x[:, -1:, ...], x[:, :-1, ...]], dim=1)
return torch.cat([x, x_extra], dim=2)
bk = look_one_back(bk)
bv = look_one_back(bv)
bkv_t = look_one_back(bkv_t)
bkv_buckets = look_one_back(bkv_buckets)
# Dot-product attention.
dots = torch.einsum('bhie,bhje->bhij', bq, bk) / (bq.shape[-1] ** -0.5)
# Causal masking, 屏蔽掉后面的word
mask = bq_t[:, :, :, None] < bkv_t[:, :, None, :]
dots = dots - 1e9 * mask
# Mask out attention to self except when no other targets are available.
self_mask = bq_t[:, :, :, None] == bkv_t[:, :, None, :]
dots = dots - 1e5 * self_mask
# Mask out attention to other hash buckets.
if not self._attend_across_buckets:
bucket_mask = bq_buckets[:, :, :, None] != bkv_buckets[:, :, None, :]
dots = dots - 1e7 * bucket_mask
# Softmax.
dots_logsumexp = torch.logsumexp(dots, dim=-1, keepdim=True)
dots = torch.exp(dots - dots_logsumexp)
dots = self.dropout(dots)
bo = torch.einsum('buij,buje->buie', dots, bv)
so = torch.reshape(bo, (batch_size, -1, bo.shape[-1]))
slogits = torch.reshape(dots_logsumexp, (batch_size, -1,))
o = batched_index_select(so, undo_sort)
_, logits = sort_key_val(sticker, slogits, dim=-1)
if self.n_hashes == 1:
out = o
else:
o = torch.reshape(o, (batch_size, self.n_hashes, seqlen, o.shape[-1]))
logits = torch.reshape(logits, (batch_size, self.n_hashes, seqlen, 1))
probs = torch.exp(logits - torch.logsumexp(logits, dim=1, keepdims=True))
out = torch.sum(o * probs, dim=1)
assert out.shape == v.shape
return out
class LSHSelfAttention(nn.Module):
def __init__(self, emb, heads = 8, bucket_size = 64, n_hashes = 8, **kwargs):
'''
:param emb: embedding_size
:param heads: 同标准transformers
:param bucket_size: 桶容量,即每个桶包含的word的数目
:param n_hashes: hash轮数
'''
super().__init__()
self.heads = heads
self.toqk = nn.Linear(emb, emb * heads)
self.tov = nn.Linear(emb, emb * heads)
self.unify_heads = nn.Linear(emb * heads, emb)
self.bucket_size = bucket_size
self.lsh_attn = LSHAttention(bucket_size=bucket_size, **kwargs)
def forward(self, x):
b, t, e, h = *x.shape, self.heads
assert t % self.bucket_size == 0, f'Sequence length needs to be divisible by target bucket size - {self.bucket_size}'
qk = self.toqk(x)
v = self.tov(x)
def merge_heads(v):
return v.view(b, t, h, e).transpose(1, 2).reshape(b * h, t, e)
def split_heads(v):
return v.view(b, h, t, e).transpose(1, 2).contiguous()
qk = merge_heads(qk)
v = merge_heads(v)
attn_out = self.lsh_attn(qk, v)
out = split_heads(attn_out).view(b, t, h * e)
return self.unify_heads(out)
-
axial positional encoding
⚠️:这个技术并没有在paper中详述,而是在代码中做了实现。
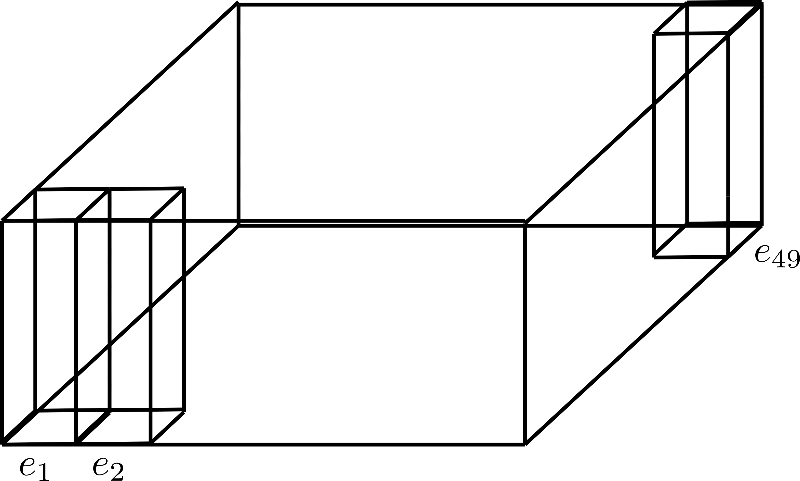
在标准transformer中,使用positional encoding来编码位置信息,这里其实也是一种embedding技术,将每个位置编码为一个向量,所以其shape为¥¥$[max_seq_len, hidden_size]$,简写为$[n_{max}, d_{h}]$,位置编码表示为$E=[e_{1},…,e_{n_{max}}]$.
假定$d_{h}=4,n_{max}=49,E$图示如下,矩形高度为$d_{h}$:

如果训练一个词表大小为$0.5M,hidden_size=1024$的positional encoding,那么需要的参数约为0.5𝑀×1024∼512𝑀,需要的内存空间约为2GB,这显然是比较大的。
Reformer的作者则是通过因式分解$n_{max}$及切分$d_{h}$来大幅度缩减了内存需求。用户可以通过设定$axial_pos_shape$参数声明一个包含两个值的list:$n_{max}^{1},n_{max}^{2}$使得$n_{max}^{1}*n_{max}^{2}=n_{max}$,通过设定$axial_pos_embds_dim$参数声明一个包含两个值的list:$d_{h}^{1},d_{h}^{2}$使得$d_{h}^{1}+d_{h}^{2}=d_{h}$.
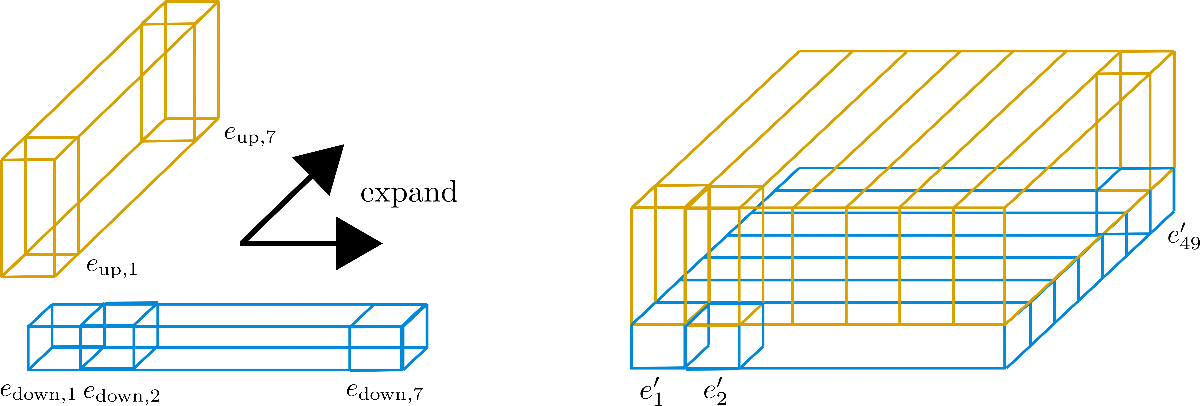
举个例子说明一下流程,假如$axial_pos_shape=[n_{max}^{1}=7,n_{max}^{2}=7]$:
上图的三个棱柱代表对应的encoding vectors,不过可以注意到,49个encoding vectors被分解成了一个7*7的矩阵,现在要做的就是使用一行的7个encoding vectors去拓展出其他的6行,基本上是重复使用他们的值。因为不鼓励不同的编码向量有相同的值,所以每一个维度(也就是高度$d_{h}$)被切分为size =1 的lower encoding vector $e_{down}$和size=3的upper encoding vector $e_{up}$,这样的话lower 部分可以沿着行维度拓展而upper部分沿着列维度拓展:
现在,对于”sub”-vectors $E_{down}=[e_{down,1},…,E_{down,49}]$只有第一行的7个元素被保留,然后沿着列维度拓展,相反,对于”sub”-vectors $E_{up}=[e_{up,1},…,e_{up,49}]$,同样只有第一列的7个元素被保留,然后沿着行维度拓展,得到的embedding vectors $e_{i}^{‘}$为: \(e_{i}^{'}=\begin{bmatrix} e_{down,i\%n_{max}^{1}}\\ e_{up,[\frac {i}{n_{max}^{2}}]} \end{bmatrix}\) 现在,这个新的encodings $E^{‘}=[e_{1}^{‘},…,e^{‘}{n{max}}]$就被称为Axial Position Encodiings,更详细的计算图如下:
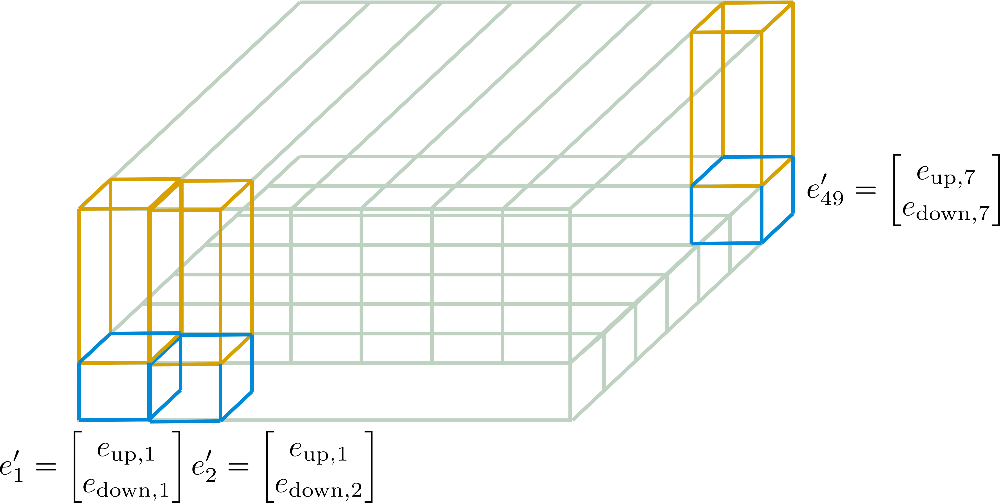
这里要看到的关键是,axial position encoding通过设计确保所有向量$[e_{1}^{‘},…,e_{n_{max}}^{‘}]$都不相等,如果axial position encoding被模型学习到,那么模型就可以更灵活地学习高效的位置表示。通过axial position encoding技术,可以估算一下内存节省的效率,假如$axial_pos_shape=[1024,512]$,$axial_pos_embds_dim=[512,512],$处理的tokens数目为$0.5M$, 对于Reformer模型,其参数数目为1024×512+512×512∼800𝐾,大约对应$3MB$内存,大大缩减了内存需求量。